矢量代数
基本运算
- 加法:A+B=B+A,满足交换律和结合律。
- 数乘:α(A+B)=αA+αB。
- 点乘(标量积):A⋅B=ABcosθ,满足交换律 A⋅B=B⋅A 和分配律 A⋅(B+C)=A⋅B+A⋅C。
- 叉乘(矢量积):A×B=ABsinθn^,其中 n^ 是垂直于 A,B 所在平面且按右手定则确定的单位矢量。叉乘满足分配律,但不满足交换律:B×A=−(A×B),且 A×A=0。
三重积
矢量的微分学
梯度
定义:标量场 T(x,y,z) 的梯度是一个矢量,表示 T 在空间变化最快的方向与速率:
∇T=∂x∂Tx^+∂y∂Ty^+∂z∂Tz^
梯度算符 ∇=x^∂x∂+y^∂y∂+z^∂z∂。
几何意义:梯度方向是函数 T 增加最快的方向,其大小等于该方向的方向导数。
例子:r=x2+y2+z2,则 ∇r=r^。
散度
定义:矢量场 v 的散度是一个标量,衡量场从某一点发散的程度:
∇⋅v=∂x∂vx+∂y∂vy+∂z∂vz
几何意义:若散度为正,表示该点有源(向外发散);为负表示汇(向内汇聚);为零表示无源。
旋度
定义:矢量场 v 的旋度是一个矢量,衡量场的旋转程度:
∇×v=x^∂x∂vxy^∂y∂vyz^∂z∂vz=(∂y∂vz−∂z∂vy)x^+(∂z∂vx−∂x∂vz)y^+(∂x∂vy−∂y∂vx)z^
几何意义:旋度方向为最大环量密度的方向,大小反映旋转的强弱。
常用恒等式
以下恒等式在电动力学中频繁使用:
-
梯度:
∇(fg)=f∇g+g∇f
∇(A⋅B)=A×(∇×B)+B×(∇×A)+(A⋅∇)B+(B⋅∇)A
-
散度:
∇⋅(fA)=f(∇⋅A)+A⋅(∇f)
∇⋅(A×B)=B⋅(∇×A)−A⋅(∇×B)
-
旋度:
∇×(fA)=f(∇×A)+A×(∇f)
∇×(A×B)=(B⋅∇)A−(A⋅∇)B+A(∇⋅B)−B(∇⋅A)
矢量的积分学
梯度定理(基本定理)
对于梯度场,其路径积分与路径无关,仅取决于端点:
∫ab(∇T)⋅dl=T(b)−T(a)
推论:沿闭合回路积分 ∮(∇T)⋅dl=0。
散度定理(高斯定理)
矢量场通过闭合曲面的通量等于其散度在曲面所围体积内的积分:
∭V(∇⋅v)dτ=∬S=∂Vv⋅da
旋度定理(斯托克斯定理)
矢量场在曲面上的通量(旋度的面积分)等于其沿曲面边界的环量:
∬S(∇×v)⋅da=∮L=∂Sv⋅dl
推论:对于闭合曲面,∮(∇×v)⋅da=0。
曲线坐标系
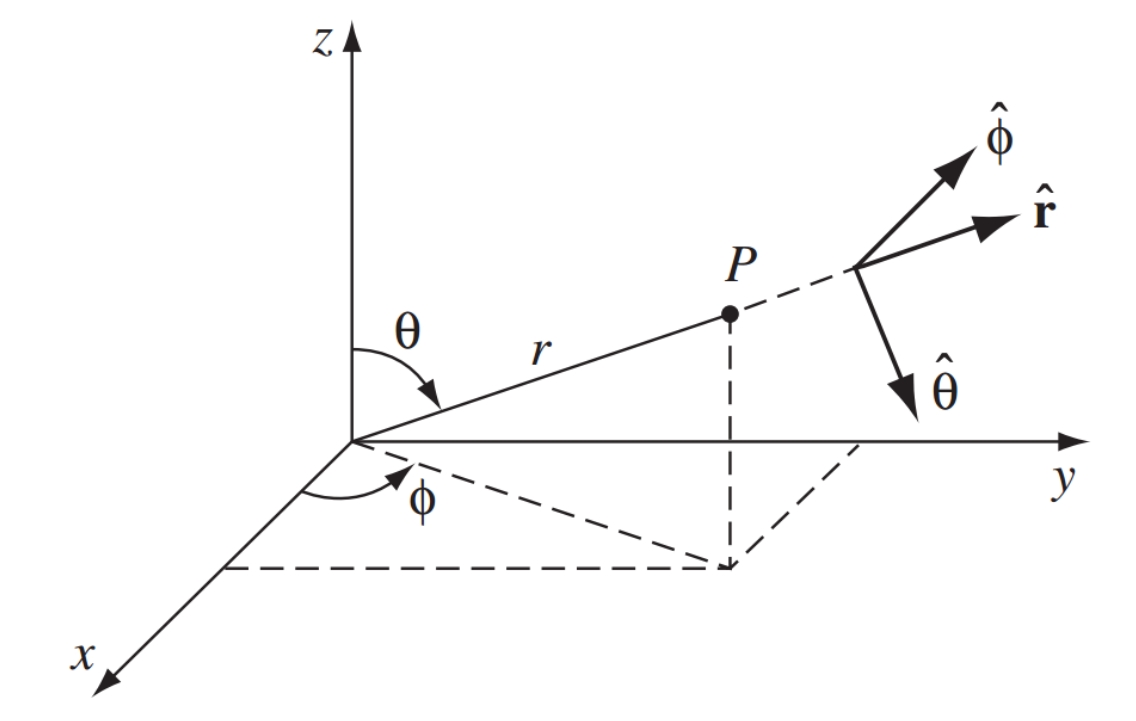
球坐标系
坐标 (r,θ,ϕ),变换关系:x=rsinθcosϕ,y=rsinθsinϕ,z=rcosθ。线元、面元、体元:
dl=drr^+rdθθ^+rsinθdϕϕ^
dar=r2sinθdθdϕr^,dτ=r2sinθdrdθdϕ
- 梯度:
∇T=∂r∂Tr^+r1∂θ∂Tθ^+rsinθ1∂ϕ∂Tϕ^
- 散度:
∇⋅v=r21∂r∂(r2vr)+rsinθ1∂θ∂(sinθvθ)+rsinθ1∂ϕ∂vϕ
- 旋度:
∇×v=rsinθ1[∂θ∂(sinθvϕ)−∂ϕ∂vθ]r^+r1[sinθ1∂ϕ∂vr−∂r∂(rvϕ)]θ^+r1[∂r∂(rvθ)−∂θ∂vr]ϕ^
- 拉普拉斯算符:
∇2T=r21∂r∂(r2∂r∂T)+r2sinθ1∂θ∂(sinθ∂θ∂T)+r2sin2θ1∂ϕ2∂2T
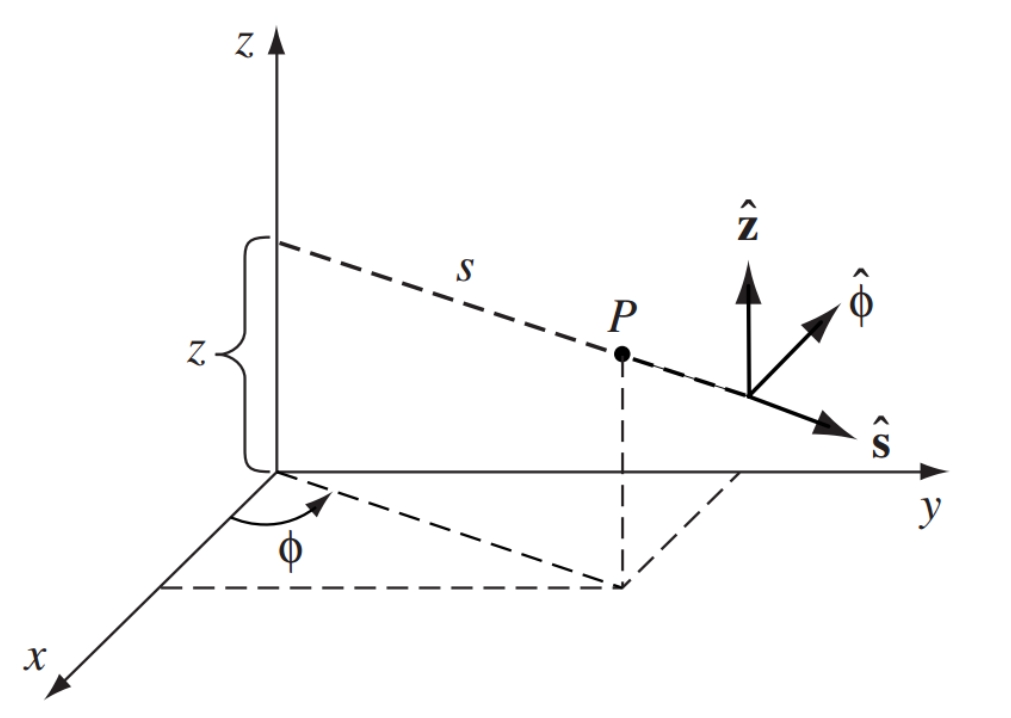
柱坐标系
坐标 (s,ϕ,z),x=scosϕ,y=ssinϕ,z=z。线元、面元、体元:
dl=dss^+sdϕϕ^+dzz^
dτ=sdsdϕdz
- 梯度:
∇T=∂s∂Ts^+s1∂ϕ∂Tϕ^+∂z∂Tz^
- 散度:
∇⋅v=s1∂s∂(svs)+s1∂ϕ∂vϕ+∂z∂vz
- 旋度:
∇×v=(s1∂ϕ∂vz−∂z∂vϕ)s^+(∂z∂vs−∂s∂vz)ϕ^+s1[∂s∂(svϕ)−∂ϕ∂vs]z^
- 拉普拉斯算符:
∇2T=s1∂s∂(s∂s∂T)+s21∂ϕ2∂2T+∂z2∂2T
狄拉克δ函数
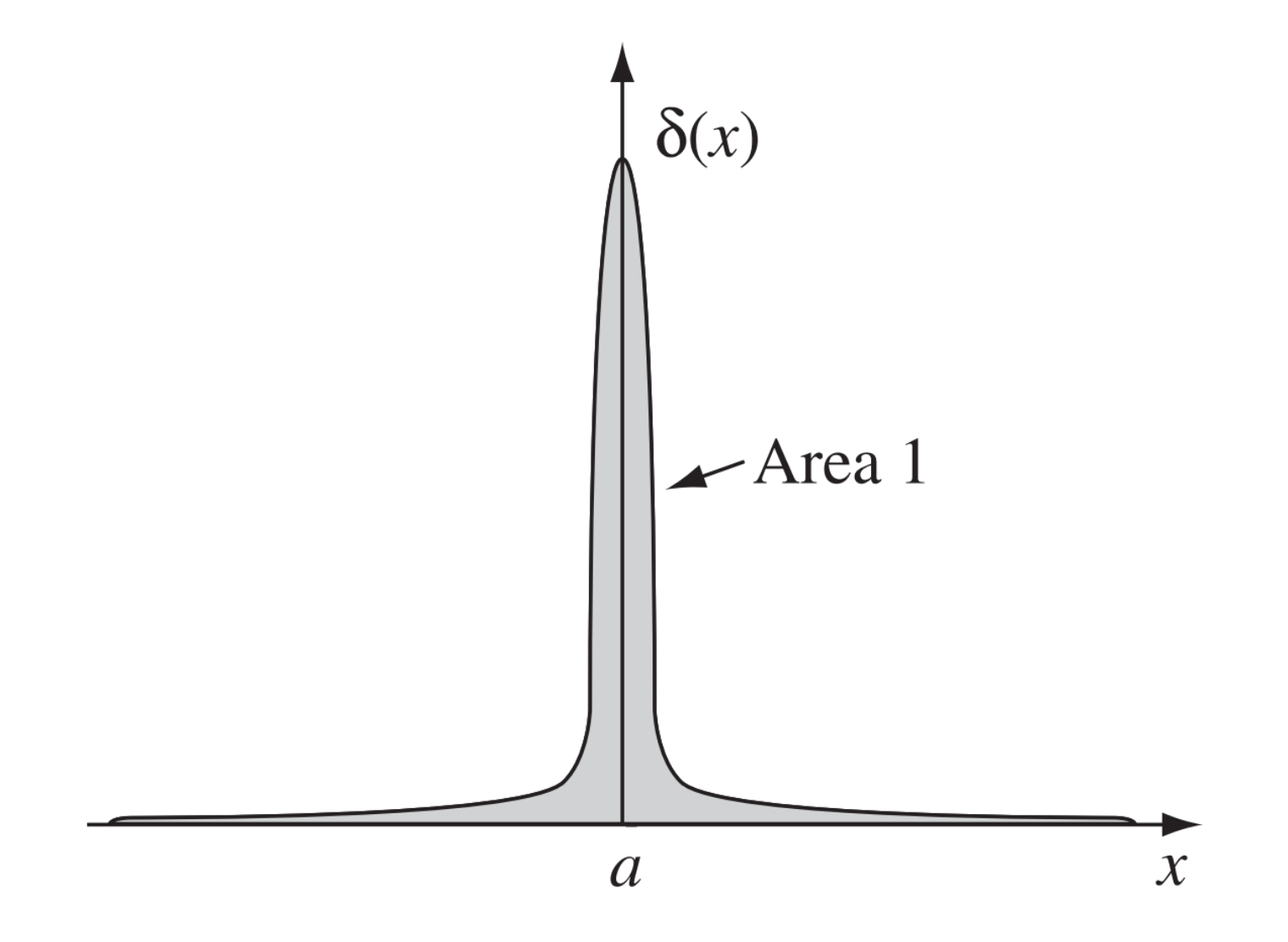
一维δ函数
狄拉克δ函数 δ(x) 不是普通函数,而是一种广义函数,满足:
- δ(x)=0 当 x=0,且 ∫−∞∞δ(x)dx=1。
- 筛选性质:∫−∞∞f(x)δ(x−a)dx=f(a)。
性质:
- 偶函数:δ(−x)=δ(x)。
- 缩放:δ(kx)=∣k∣1δ(x)。
- 与函数乘积:f(x)δ(x−a)=f(a)δ(x−a)。
三维δ函数
三维δ函数可定义为三个一维δ函数的乘积:
δ3(r)=δ(x)δ(y)δ(z)
满足 ∭all spaceδ3(r)dτ=1,筛选性质:
∭f(r)δ3(r−a)dτ=f(a)
缩放性质:δ3(kr)=∣k∣31δ3(r)。
矢量分析中的δ函数
考虑矢量场 v=r3r,其散度:
∇⋅(r3r)=4πδ3(r)
这一结果解释了散度定理在该场中的表现:虽然直接计算 ∇⋅v=0(当 r=0),但通过闭合曲面积分得到 4π,因此必须在原点处引入δ函数来修正。
另一个重要恒等式:
∇2(r1)=−4πδ3(r)
矢量场理论
亥姆霍兹定理
一个矢量场 F(r) 由其散度 D(r)=∇⋅F 和旋度 C(r)=∇×F 唯一确定,当且仅当 当 r→∞ 时,F 趋于零,且 D 和 C 趋于零的速度比 1/r2 更快:
F 可被 D 和 C 唯一定义⟺⎩⎨⎧F→0,r2D→0,r2C→0,(r→∞)
势的形式
- 无旋场:若 ∇×F=0,则 F 可表示为某标量势的梯度:F=∇V,且路径积分与路径无关,∮F⋅dl=0。
- 无散场:若 ∇⋅F=0,则 F 可表示为某矢量势的旋度:F=∇×A,且通过任何闭合曲面的通量为零,∮F⋅da=0,曲面积分与所选曲面(以同一曲线为边界)无关。
张量初步
张量的定义
张量是矢量的推广,在坐标变换下满足特定的变换规律。按阶数分类:
- 标量:0 阶张量。
- 矢量:1 阶张量。
- 二阶张量:可视为并矢,在三维空间中有 3×3=9 个分量。
一个二阶张量 T 可表示为:
T=i,j∑Tijeiej
其中 ei 是基矢量,eiej 表示并矢。
物理实例:应力张量
在连续介质中,作用在某面元上的力 F 与该面元的定向有关,可用应力张量 T 描述:
dF=T⋅da
分量 Tij 表示在垂直于 j 方向的单位面积上沿 i 方向的力。
张量的代数运算
- 数乘与加法:(αT)ij=αTij,(T+P)ij=Tij+Pij。
- 张量与矢量的点乘(左乘和右乘结果不同):
(v⋅T)i=j∑vjTji,(T⋅v)i=j∑vjTij
两者一般不相等。
- 张量间的点乘:(T⋅P)ij=∑kTikPkj。
- 散度:张量场的散度定义为矢量,其第 i 分量为
(∇⋅T)i=j∑∂xj∂Tji
张量的坐标变换
设坐标变换矩阵为 R(正交矩阵),则矢量变换为 A~i=∑jRijAj。二阶张量变换为:
T~ij=k,l∑RikRjlTkl
即矩阵形式 T~=RTRT。
张量分析在电动力学中用于描述电磁应力、能量动量张量等,是深入理解场与物质相互作用的重要工具。